Sai số quỹ đạo là độ lệch của quỹ đạo thực so với quỹ đạo tính toán. Có các nguyên nhân chủ yếu sau gây ra sai số quỹ đạo: Sự hạn chế về độ phân giải và độ chính xác của trường trọng lực trái đất được sử dụng để tính quỹ đạo, sai số tọa độ của các trạm theo dõi,sai số hoặc hạn chế trong các hệ thống theo dõi vệ tinh (Doppler, Laser, GPS,..) và sai số do mô hình trong tính toán quỹ đạo.
Sai số do mô hình trường trọng lực
Trong các nguyên nhân trên thì ảnh hưởng của trường trọng lực trái đất lớn nhất, đặc biệt là đối với các chương trình đo cao vệ tinh có từ sớm. Mỗi vệ tinh đặc biệt nhạy cảm với một nhóm của các hệ số điều hòa của mô hình trường trọng lực. Chính điều này đã thúc đẩy việc phát triển xây dựng mô hình trường trọng lực để đáp ứng yêu cầu xác định quỹ đạo vệ tinh. Việc này đã và đang được thực hiện, ví dụ, với mô hình GEM10 đã cải thiện độ chính xác quỹ đạo của vệ tinh GEOS-3 từ 10m lên 1 đến 2m.
Các mô hình trường trọng lực đáp ứng yêu cầu từ PGS-S1 đến PGS-S4 được phát triển phục vụ cho vệ tinh SEASAT và đã cải thiện độ chính xác quỹ đạo từ 5m đến 1m như hình bên dưới:
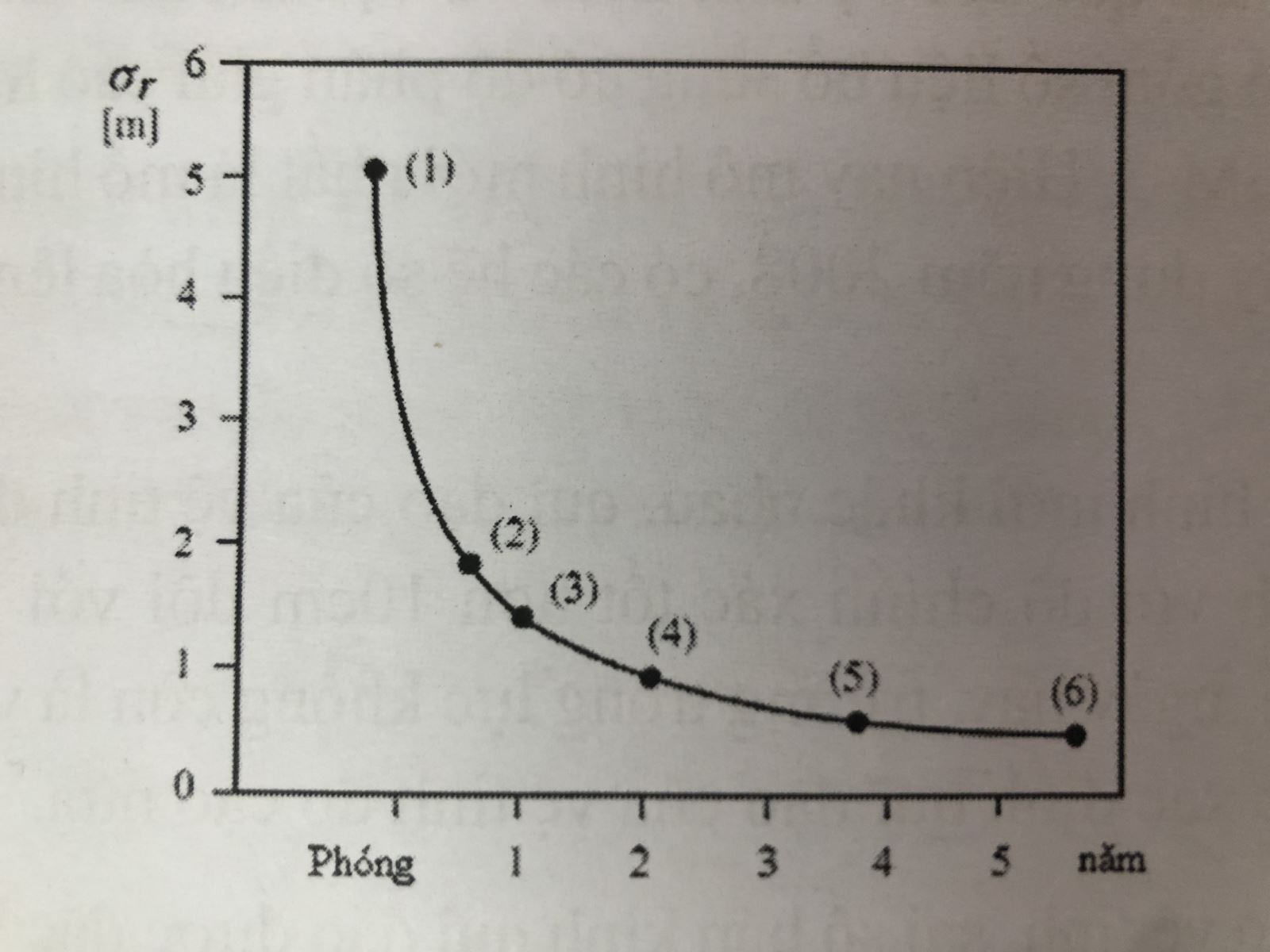
Hình 1: Sự cải thiện của độ chính xác bán kính quỹ đạo đối với SEASAT.
Trong hình trên (1) là độ chính xác trước khi phóng, (2),…,(5) là độ chính xác khi bổ sung số liệu từ laser SEASAT, số liệu đo cao GEOS-3, số liệu đo cao SEASAT, Doppler TRANET, (6) là độ chính xác cuối cùng.
Các mô hình này cũng có thể được sử dụng cho ERS-1 bởi vì nó cũng có các thành phần quỹ đạo tương tự như SEASAT. Quỹ đạo chính xác của GEOSAT ở mức 50cm, đã được tính toán trên cơ sở mô hình trường trọng lực GEM-T2. GEM-T3 là phiên bản tinh chế với việc sử dụng số liệu đo cao vệ tinh từ GEOS-3, SEASAT và GEOSAT. Trên cơ sở GEM-T3 hàng loạt mô hình trường trọng lực chung (JGM – Joint Gravity Model) được phát triển để tính toán quỹ đạo chính xác cho vệ tinh T/P. Vì không có vệ tinh nào có quỹ đạo tương tự phóng trước đó nên một mô hình JGM-1 được sử dụng bắt đầu cho vệ tinh T/P, kết hợp với số liệu quan sát laser, DORIS và số liệu đo cao vệ tinh trực tiếp từ GEOS-3, SEASAT và GEOSAT, kết quả nhận được mô hình JGM-2. Khi bổ sung số liệu SLR, DORIS và GPS của T/P kết quả nhận được mô hình JGM-3. Mô hình này cung cấp quỹ đạo chính xác ở mức 10cm đối với việc xử lý lại số liệu vệ tinh GEOSAT và nó cũng phù hợp với vệ tinh JASON.
Trên cơ sở JGM-3, một mô hình điều chỉnh đã được phát triển để phục vụ cải thiện quỹ đạo vệ tinh ERS và vệ tinh ENVISAT. Mô hình EGM-96 bao gồm số liệu bổ sung có độ phân giải cao hơn nhiều so với mô hình JGM-3. Hiện nay mô hình mới nhất là mô hình EGM-2008 được Mỹ xây dựng năm 2008, có các hệ số điều hòa lên đến cấp và bậc 2190.
Với các mô hình mới khác nhau, quỹ đạo vệ tinh đo cao có thể được xác đinh tốt hơn 10cm đối với bán kính xuyên tâm. Do đó, ngày nay, trường trọng lực không còn là yếu tố chi phối độ chính xác xác định quỹ đạo của vệ tinh đo cao nữa.
Trong đo cao vệ tinh, sai số bán kính quỹ đạo được đặc biệt quan tâm. Khoảng cách địa tâm của vệ tinh có thể được xấp xiwr cho cung quỹ đạo ngắn như sau:
r=a(1-ecosE)
Tuyến tính hóa ta được sai số bán kính quỹ đao xuyên tâm:
Δr=Δa+eΔM asinM – Δe acosM

Hình 2: Mô tả hình học tại điểm hiệu chuẩn.
Ở đây dị thường lệch tâm E được xấp xỉ bằng dị thường trung bình M. Rõ ràng sai số bán kính quỹ đạo phụ thuộc vào Δa, ΔM và Δe có thể coi là không đổi trên phần ngắn quỹ đạo. Một phân tích của phương trình Lagrange chứng minh rằng các sai số trong hệ số trường trọng lực dẫn đến thay đổi theo chu kỳ và cộng hưởng trong ba thành phần. Do đó, ảnh hưởng phải được mô hình hóa một cách cẩn thận.
Sai số do các hệ thống theo dõi quỹ đạo
Một khía cạnh quan trọng thứ hai trong việc xác định quỹ đạo là các hệ thống theo dõi. Các hệ thống hoạt động ở mọi thời tiết như GPS hay DORIS là một lợi thế để xác định quỹ đạo. Khi yêu cầu độ chính xác cao ví dụ như khi hiệu chuẩn hoặc cho những dự án đặc biệt thì công nghệ đo laser đến vệ tinh được áp dụng cho những việc theo dõi gương phản xạ là phụ thuộc vào thời tiết và các trạm quan trắc phải phân bố trên toàn cầu. Đối với vệ tinh GEOSAT thì theo dõi Doppler trên cơ sở TRANET đạt kết quả tốt.
Chương trình T/P chủ yếu dựa trên kỹ thuật DORIS, Doppler. Sau khi hệ thống PRARE trên vệ tinh bị hỏng, việc xác định quỹ đạo chủ yếu dựa vào đo laser. PRARE và SLR được sử dụng cho ERS-2. DORIS và SLR sử dụng cho ENVISAT.
Tọa độ địa tâm của các trạm theo dõi thường liên quand dến ITRF và được xác định dựa trên những kỹ thuật đo toàn cầu chính xác như SLR, VLBI, GPS, DORIS. Độ chính xác tiếp xúc được cải tiến bằng những trị đo mới và hiện nay đã đạt cỡ cm. Tuy nhiên đối với những vệ tinh có sớm như GEOS-3, SEASAT-1, GEOSAT, tọa độ của các trạm theo dõi có thể bị sai cỡ vài mét. Một sự hiệu chỉnh mới cho các số liệu đo cao vệ tinh cũ với sự cải thiện quỹ đạo có thể được thực hiện. Ví dụ như xử lý lại số liệu đo cao vệ tinh GEOSAT GM trên cơ sở mô hình trường trọng lực JGM-3 kết hợp với số liệu quan sát Doppler.
Ngay cả với điều kiện thuận lợi và có hệ thống theo dõi hiện đại thì các sai số quỹ đạo còn lại cũng chiếm một phần đáng kể trong tổng sai số đo cao. Do đó, các phương pháp cải thiện quỹ đạo phải được áp dụng. Kỹ thuật phi động học có thể được sử dụng bởi vì chỉ có thành phần bán kính véc tơ là được quan tâm. Hầu hết các phương pháp này dựa trên kỹ thuật giao chéo.
Theo cuốn Xác định dị thường trọng lực biển bằng số liệu đo cao vệ tinh của TS. Nguyễn Văn Sáng,
NXB Tài nguyên – Môi trường và Bản đồ Việt Nam, năm 2017.